مقدمهای بر مکاترونیک
کلمه مکاترونیک توسط مهندس ژاپنی، کو کیکوچی، در سال ۱۹۶۹ اختراع شد. این کلمه ترکیبی از اصطلاح «مکانیکی» (مکا به معنای مکانیسمها، یعنی ماشینهایی که «حرکت میکنند») و «ترونیک» از «الکترونیک» به معنای ادغام مکانیک، برق و الکترونیک در یک دستگاه واحد است.
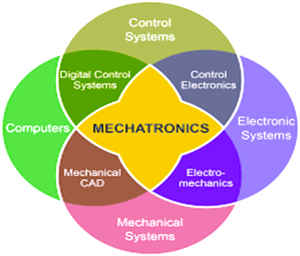
این کلمه به عنوان نقطه اتصال سیستمهای اصلی در مهندسی مکانیک، مهندسی برق و علوم کامپیوتر برای طراحی، ساخت و بهرهبرداری از محصولات با هم ترکیب شدهاند.
در نتیجه، انعطافپذیری بیشتری دارد، طراحی مجدد و برنامهریزی مجدد آن آسان است و همچنین توانایی انجام جمعآوری، تجزیه و تحلیل، آمادهسازی و گزارشدهی خودکار دادهها را دارد
این سیستم نه تنها ترکیبی از سیستمهای مکانیکی و الکتریکی است، بلکه چیزی بیش از یک سیستم کنترل است که در آن ادغام کاملی از همه آنها وجود دارد که در آن یک رویکرد همزمان برای طراحی وجود دارد
در کاربردهای روزمره ما مانند اتومبیل، ماشین ابزار، ماشین لباسشویی، دوربین و بسیاری از ماشینهای دیگر، چنین رویکرد یکپارچه و بین رشتهای برای طراحی مهندسی به طور فزایندهای در حال اتخاذ است.
مکاترونیک باید به جای یک فرآیند متوالی، رشتههای مختلفی را درگیر کند. بنابراین، مکاترونیک مسیری است که در آن ادغام زمینههای مختلف مهندسی برای انجام کار وجود دارد.
فرآیند مکاترونیک، حوزههای فنی مختلف حسگرها، ابزار دقیق، درایوها و محرکها و کنترلکنندهها را برای تجزیه و تحلیل رفتار، عملکردها، مراحل فرآیند و رویکرد به سیستم، گرد هم میآورد.
برای مثال، حسگرها و مبدلها به فرآیند مکاترونیک مربوط میشوند که در آن به عنوان دستگاههای میدانی طبقهبندی میشوند و برای دادههای فیزیکی بهدستآمده استفاده میشوند، آنها دستوراتی را برای فعال کردن خروجی تولید میکنند.
کل این سیستم شامل جمعآوری دادهها، تجزیه و تحلیل و کنترل، از اصول اولیه هر سیستم اتوماسیون است.
تکامل مکاترونیک
انقلاب صنعتی نقش عمدهای در تکامل مکاترونیک ایفا میکند. توسعه صنایع و نیاز آنها منجر به تکامل این فناوری در دنیای امروز شد.
از آنجایی که مکاترونیک با تمام جنبههای صنایع در مکانیک، برق و الکترونیک، کامپیوتر و سیستمهای اطلاعاتی سروکار دارد، با ظهور هر انقلابی، نیاز جدیدی ایجاد میشود و تولد مکاترونیک راهحلهای مناسبی را برای بسیاری ارائه میدهد.
مکاترونیک چهارمین بخش از انقلاب صنعتی پس از انقلابهای مکانیک، نیمههادی و اطلاعات است.
انقلاب صنعتی
این اولین انقلابی است که در آن، طراحی محصولات و فرآیندها، مقادیر فزایندهای از انرژی را برای فعالیتهای صنعتی تبدیل و منتقل میکند.
طراحیهای مهندسی در این دوره، عملیات حرکت، انتقال، حسگری و تحریک را با استفاده از اجزای مکانیکی مانند بادامکها، چرخدندهها، اهرمها و اتصالات انجام میدادند.
اما سیستمهای صرفاً مکانیکی محدودیتهایی مانند عدم توانایی در تقویت بیشتر توان و تلفات انرژی به دلیل اصطکاک و حرکت مداوم دارند.
انقلاب نیمههادیها
رهبری توسعه فناوری مدار مجتمع (IC) را بر عهده داشت و تأثیر عمدهای بر مهندسی و محصولات آن گذاشت. این انقلاب به دلیل اندازه مینیاتوری و راندمان توان در تقویت، نسبت به انقلاب قبلی مقرون به صرفهتر در نظر گرفته میشود و سطح توان مورد نیاز را از طریق سیگنالهای الکتریکی به دستگاههای مکانیکی میرساند.
به طور مشابه، در سمت حسگری، این تکامل، اندازهگیریهای فیزیکی را به صورت سیگنالهای آنالوگ/دیجیتال ارائه میدهد و کدگذاری میکند. به غیر از آن، الکترونیک آنالوگ/دیجیتالِ سختافزاریِ داخلی، قابلیت محاسباتی را برای دستگاههای مکانیکی فراهم کرد.
توسعه سریع در حسگری و تحریک الکترومکانیکی و سختافزار در این انقلاب آغاز شد و با پذیرش فناوری نیمههادی در طراحی و عملکرد دستگاههای مکانیکی تکمیل شد.
انقلاب اطلاعات
این انقلاب امکان انتقال هوش به تعدادی از محصولات، فرآیندها و ماشینها را فراهم میکند. در پایان قرن بیستم، این فناوری اطلاعات رشد انفجاری را تجربه میکند و سیستمهای محاسباتی به یک روند تبدیل میشوند.
یک تحول عظیم در طراحی و عملکرد دستگاهها و سیستمهای مکانیکی با فناوری اطلاعات ترکیب شد و امکان انتقال هوش به محصولات، فرآیندها و ماشینهای متعدد را فراهم کرد.
ریزپردازندهها شروع به جایگزینی اجزای مکانیکی میکنند که در آنها بسیاری از توابع برای انجام سریع عمل با اندازه جمع و جور شبیه سازی شدهاند.
و همچنین، قابلیت برنامهریزی ریزپردازندهها فرصتهای زیادی را فراهم میکند و همچنین به عنوان یک جایگزین انعطافپذیر برای سختافزار محاسباتی آنالوگ/دیجیتال سیمکشی شده در نظر گرفته میشود.
ادغام همه دستگاههای کامپیوتری، مکانیکی و الکتریکی اکنون قادر به تبدیل، انتقال و پردازش انرژی فیزیکی و انرژی مجازی شده است.
انقلاب مکاترونیک
انقلاب و روند فعلی اتوماسیون و تبادل دادهها در فناوریهای تولیدی، انقلاب مکاترونیک است.
جنبههای اصلی آن سیستمهای فیزیکی سایبری، اینترنت اشیا و محاسبات ابری هستند. این انقلاب، معرفی روشهای خودبهینهسازی، خودپیکربندی، خودتشخیصی، شناخت و پشتیبانی هوشمند از کارگران در کار پیچیدهشان را ایجاد کرد.
حوزههایی که بیشترین سود را خواهند برد، تولید، انرژی، حمل و نقل، مراقبتهای بهداشتی و کشاورزی هستند.
این انقلاب چهار اصل اصلی دارد. آنها عبارتند از:
قابلیت همکاری متقابل
شفافیت اطلاعات
کمک فنی
تصمیمات غیرمتمرکز
1. قابلیت همکاری
توانایی ماشینها، انسان، دستگاهها و حسگرها برای اتصال و ارتباط با یکدیگر از طریق یک شبکه.
2. شفافیت اطلاعات
هدف سیستمهای اطلاعاتی، ایجاد یک کپی مجازی از دنیای فیزیکی با توسعه ماژولهای دیجیتال با دادههای حسگر است.
این فرآیند، جمعآوری دادهها را برای به اشتراک گذاشتن با فرد یا دستگاه برای انجام دستور انجام میدهد.
3. کمک فنی
توانایی سیستمهای کمکی برای پشتیبانی از انسانها با جمعآوری و تجزیه و تحلیل اطلاعات از دستگاه یا ورودی برای حل یک مشکل فوری در کوتاهترین زمان ممکن، و همچنین سیستمهای سایبری-فیزیکی برای پشتیبانی فیزیکی از انسانها در انجام وظایف بزرگی که برای انسان و همکاران خطرناک، طاقتفرسا یا ناامن هستند.
4.تصمیمات غیرمتمرکز
قابلیت تصمیمگیری مستقل و انجام وظایف تا حد امکان به صورت خودکار. فقط در صورت وجود استثنائات، تداخلات یا اهداف متناقض، وظایف در سطح بالایی ثابت میشوند.
عامل اصلی، ارتباط M2M است که به عنوان ارتباط ماشین به ماشین شناخته میشود. این بدان معناست که دو ماشین با استفاده از هر کانال ارتباطی با ارتباط سیمی یا بیسیم با یکدیگر ارتباط برقرار میکنند.
این ارتباط M2M شامل خواندن حسگر، نظارت بر دادهها، تجزیه و تحلیل دادهها، آمادهسازی سیگنال و ضبط دادهها است.
این ارتباط دارای یک شبکه از راه دور از ماشینها با یک هاب مرکزی سرور خواهد بود که دستگاه دیگر را به اشتراک میگذارد یا فرآیند انجام برخی کارهای خودکار را در درون خود انجام میدهد.
عناصر مکاترونیک
مکاترونیک = مکانیک + برق + الکترونیک + کامپیوتر + رباتیک.
عناصر مکانیکی به ساختار مکانیکی، سازوکار و جنبههای حرارتی یک سیستم مکاترونیک اشاره دارند. این ممکن است شامل ویژگیهای استاتیک/دینامیک باشد و با محیط کاری تعامل خواهد داشت. این عنصر مکانیکی برای تولید حرکت، نیرو و گرما به نیروی فیزیکی نیاز دارد.
برق به اجزا و مدارهای الکتریکی، سیگنالها و تعامل محرکهای مکانیکی و ماژول قدرت برای هر جنبه اشاره دارد و عناصر الکترونیکی به الکترونیک آنالوگ/دیجیتال، ترانزیستورها، تریستورها، تقویتکنندهها، الکترونیک قدرت، آپ امپ، تولید سیگنال، پردازش و تنظیم آن برای اجزا و مدارها اشاره دارد. این عناصر الکتریکی و الکترونیکی برای اتصال حسگرها و محرکهای الکترومکانیکی برای کنترل سیستم و طراحی استفاده میشوند.
عناصر الکترومکانیکی به حسگرها و محرکها اشاره دارند. این عناصر نقش مهمی در فعال شدن کل فرآیند با ایجاد رابط حسگرهای ورودی و محرکهای خروجی ایفا میکنند. این حسگرها اطلاعات را دریافت میکنند و پردازنده در این فرآیند، شرایط منطقی را انجام میدهد و پس از تجزیه و تحلیل، محرک را پردازش میکند.
عناصر محاسباتی از طریق برنامهنویسی و تعامل با حسگرها از طریق دستورات، عملکرد منطقی را برای پردازنده ایجاد میکنند و ذخیرهسازی، نظارت و ضبط دادهها در این عناصر انجام میشود. این همچنین یک بخش منبع برای ارتباطات خواهد بود که در آن همه اجزا به صورت جداگانه یا از طریق سرور هاب مرکزی از طریق شبکه با هم تعامل دارند.
رباتیک نیز یکی از عناصر این مکاترونیک است که برای انجام یک کار یا عملیات خاص در هر زمینهای به تمام اجزای مکانیکی، الکتریکی، الکترونیکی، کنترلی و برنامهنویسی نیاز دارد. این تحول عمده در دنیای امروز است.
این رباتیک، آیندهی تمام فرآیندها را به سمت یک کار ساده سوق خواهد داد که در آن عملیات اصلی انسانی کاهش یافته و تمام فرآیندها خودکار خواهند شد. برخی از کاربردهای رباتیک امروزی عبارتند از کوادکوپترها، وسایل نقلیهی خودران، رباتهای انتخاب و قرار دادن و رباتهای انساننما.
در حال حاضر، این رباتیک از فناوریهایی مانند بینایی کامپیوتر، هوش مصنوعی، یادگیری ماشین، مکانیک ربات و کنترل برای انجام فرآیند استفاده خواهد کرد.
کباتیک بخشی از رباتیک است که از اصطلاحات «همکاری» و «رباتیک» تشکیل شده است.
این کباتیک به گونهای طراحی شده است که باید در یک محیط کار مشترک با انسانها تعامل داشته باشد.
این ربات به گونهای طراحی شده است که باید به صورت خودکار یا با راهنمایی محدود عمل کند، کاری که اکثر رباتهای صنعتی انجام میدهند.
نتیجهگیری
بنابراین، با این اوصاف، میتوانیم درک کنیم که مکاترونیک شاخهای از مهندسی است که شامل مکانیک، برق، الکترونیک، کنترل کامپیوتر، برنامهنویسی و عملیات یکپارچه همه سیستمها میشود. مکاترونیک به عنوان تعامل مکانی زیرسیستمها در یک واحد فیزیکی و هوش مرتبط با عملکرد کنترل سیستم در نظر گرفته میشود.
به طور خلاصه، مکاترونیک حوزه مهندسی است که در آن گروهی از اجزای الکترومکانیکی میتوانند وظایف خاصی را انجام دهند یا به نتایج مطلوب خاصی به شیوهای مطلوب در حین کار با یکدیگر دست یابند.